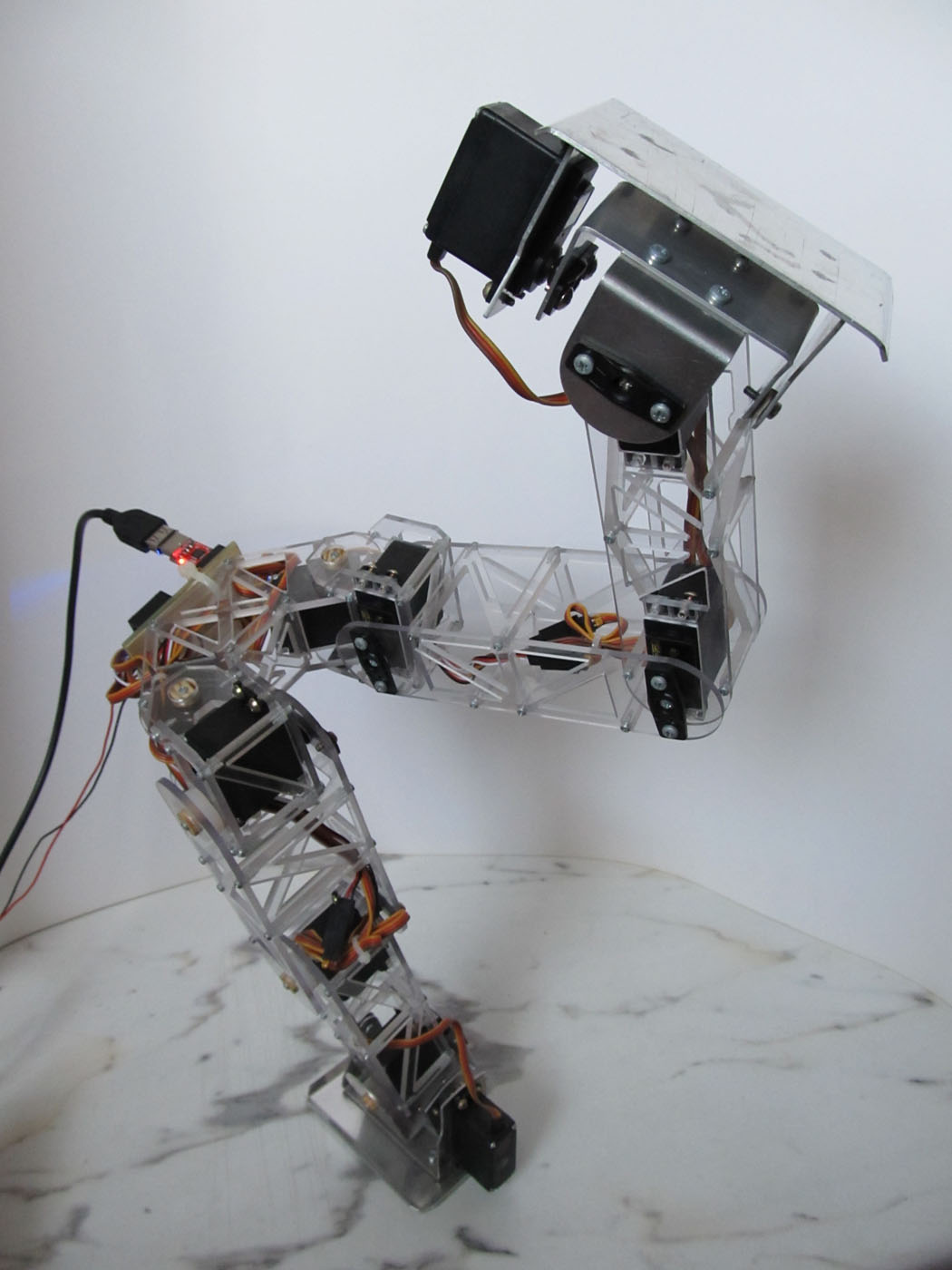
Robot kroczący
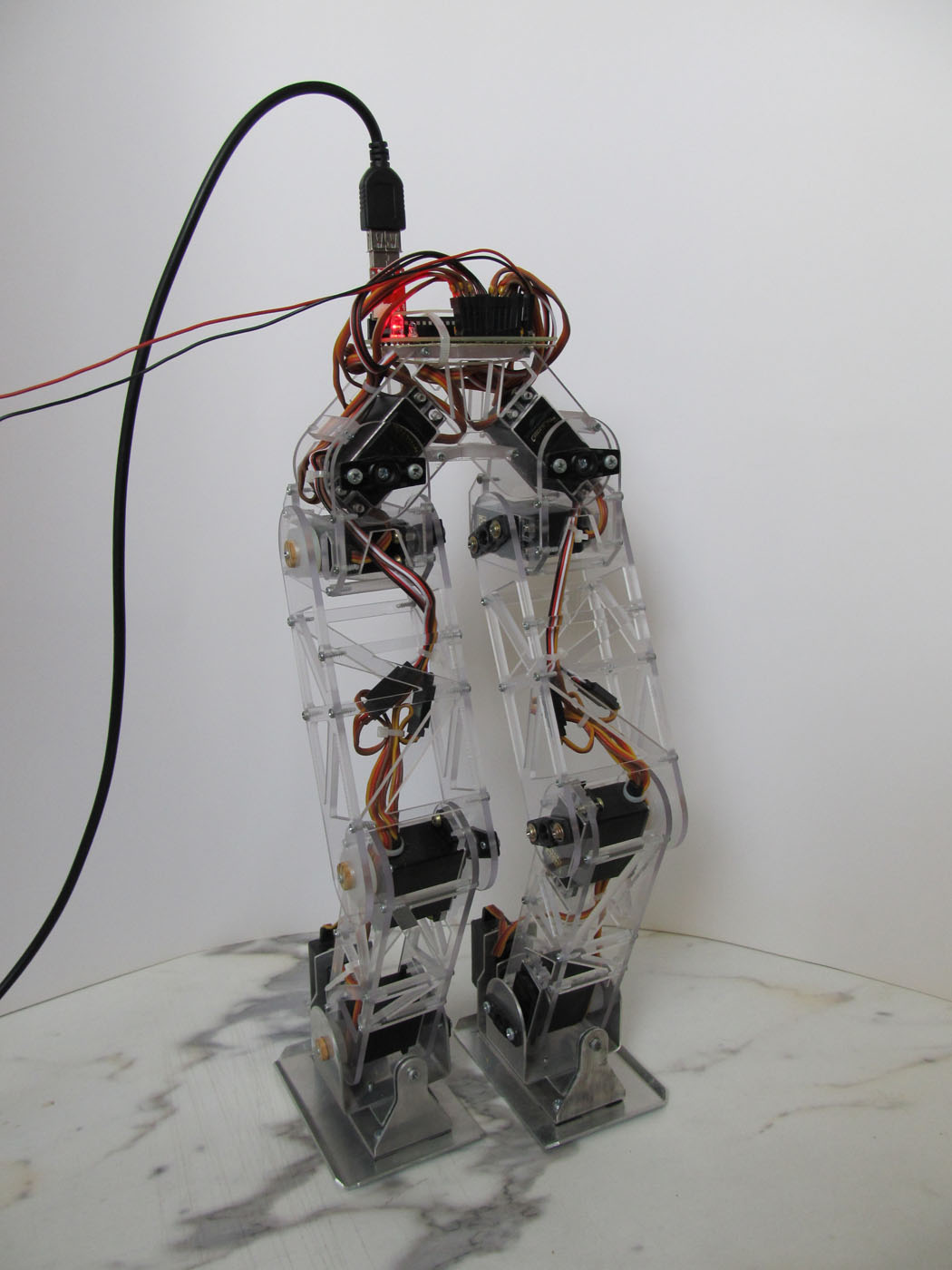
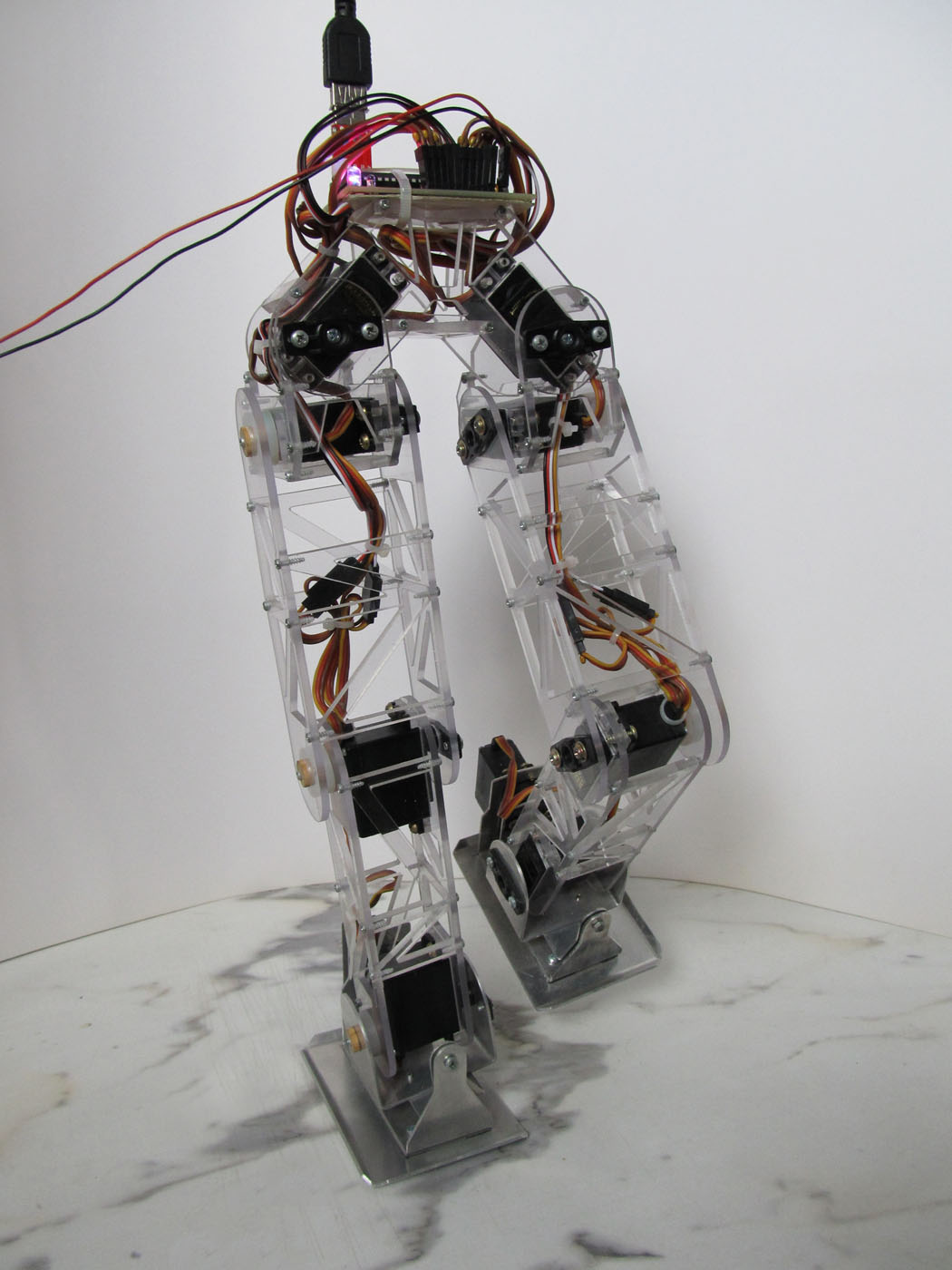
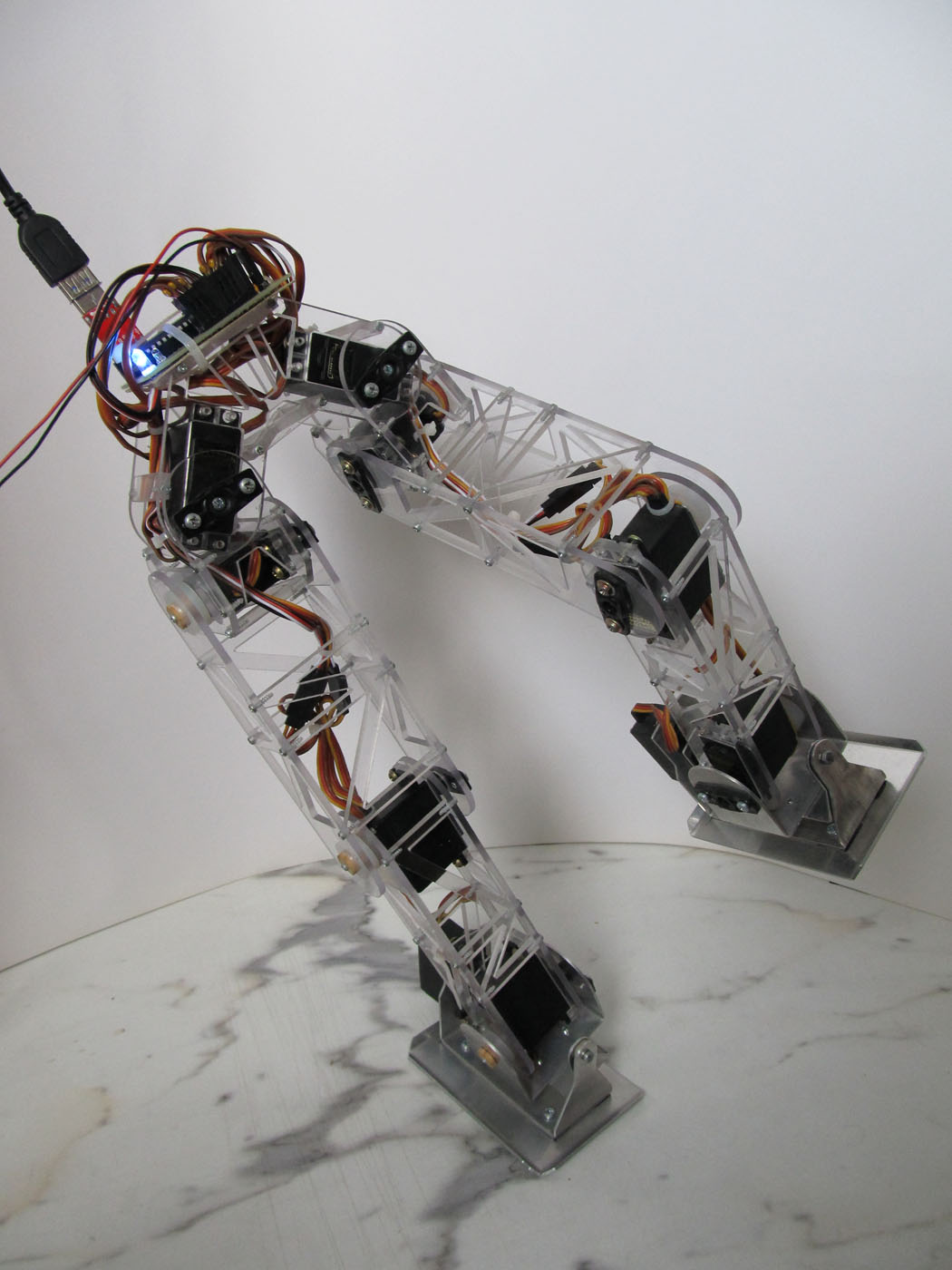
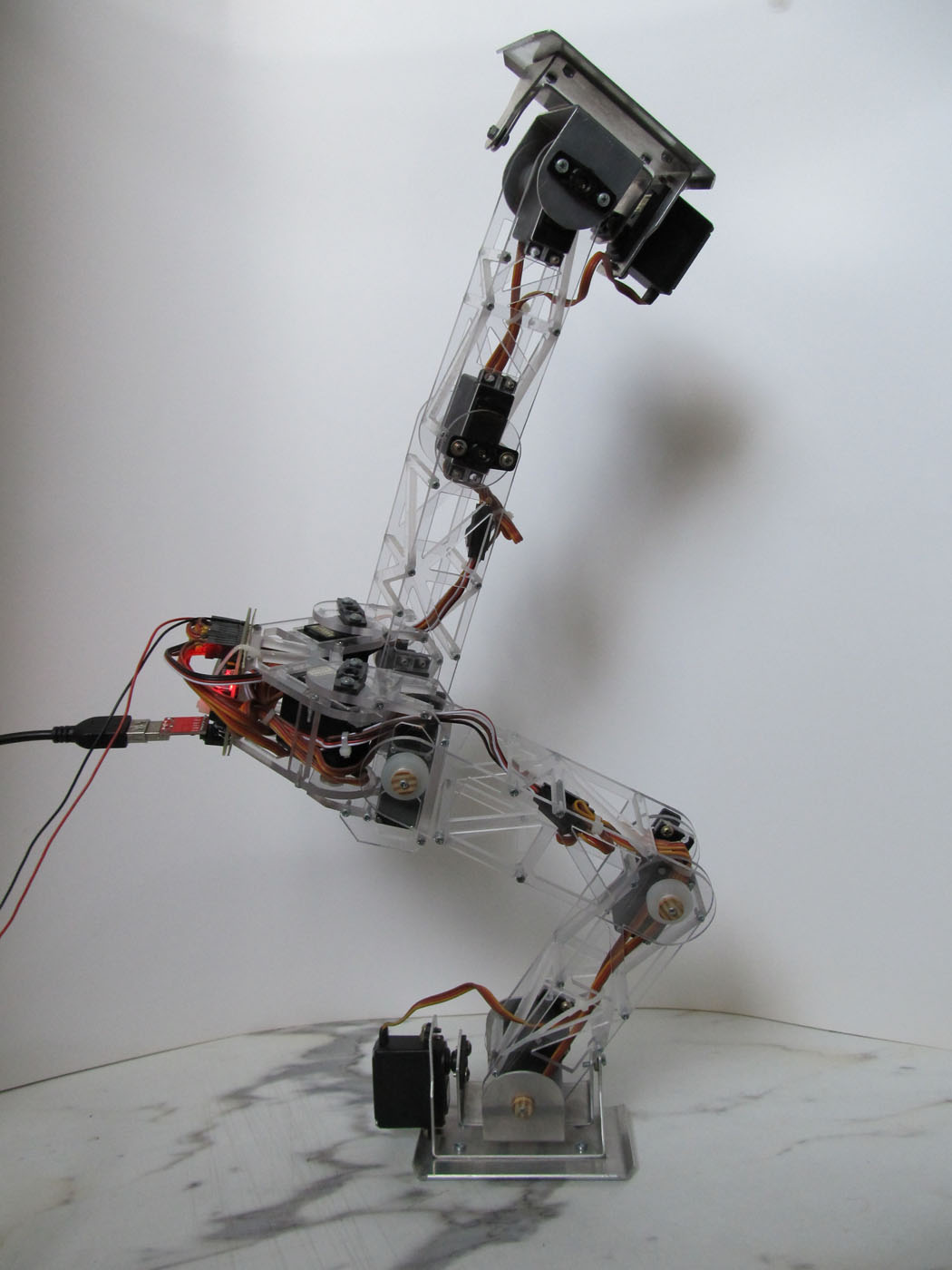
Projekt dwunożnego robota kroczącego zrealizowanego przez Andrzeja Durlaka, byłego studenta z koła. Konstrukcja zbudowana jest z wyciętych z poliwęglanu oraz aluminium elementów. Cały robot sterowany jest przez komputer na którym uruchomiona jest symulacja.